<研究事業名> 福祉機器研究開発事業
<研究テーマ> 身体装着型動きセンシングシステムの開発
<担当者名> 太田靖,宮田登,古川博道
<目的> 下肢FES(機能的電気刺激)のフィードバック制御実現に向けた,立位・歩行状態センシングシステムの開発
<内容および結果>
1. 目的と実験方法
FESの安定化のためには,現在の状態や動作を計測して目標位置とのずれを検出し,フィードバックを行う必要がある。本年度は,立位時の身体重心移動を簡便かつリアルタイムにセンシング可能なセンサシステムを試作し,床反力計上で健常者の立位揺動計測により検証を行う。検討および実験の内容は以下のとおり。
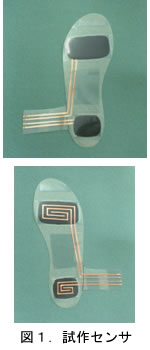
(1)身体重心移動のセンシングには,荷重に応じて表面抵抗値が変化する感圧導電ゴムを用いる。圧力変化は電圧(抵抗値)計測により求められるため,信号増幅回路が不要でリアルタイム計測が可能となる。
(2)立位時の身体重心位置(COG)は足底の荷重中心(COP)にほぼ一致し1),COPは片足につき2つのエリアの荷重計測でセンシング可能である2)ため,計測回路は大幅に簡素化できる。
(3)計測は,健常者(29歳男性)で行い,立位姿勢のまま自発的に前後・左右に揺動する動作で行う。
2. 試作・実験結果
(1)試作したセンサを図1に示す(表側と裏側)。センサシートのサイズは被験者に合わせて決定した。
(2)床反力計との同時計測結果を図2および図3に示す。前後方向揺れに関してはほぼ床反力計と一致しており,左右方向についても,振幅は小さく検出されるものの変化はほぼ同じ結果が得られている。
(3)感圧導電ゴムの圧力-抵抗値特性はやや不安定だが,2つのエリアの抵抗比により荷重中心位置を算出するため,ゴム自体の不安定性がほぼキャンセルされている。
今後は,これまでに得られた結果を元に,実際のFES制御(立位保持)に応用する。
1)平成11年度宮城県産業技術総合センター業務報告, p.19, 2000
2)平成12年度宮城県産業技術総合センター業務報告, p.19, 2001
※ 本研究の一部は宮城県地域結集型共同研究事業の一環として行ったものである。